
In Nitrux, we use OpenRC as the init system; it differs from the more widely used systemd software suite (which includes an init) by using scripts instead of “units” to start services. So, in today’s tutorial, we’ll check how to create service files (scripts) for use with OpenRC.
This tutorial is part one of two; the second covers “user” services.
Difficulty: ★☆☆☆☆
Structure
Let’s start with an example.
- ⚠️ Important: Adding system services files requires adding files to the root directory; see System Management → NX Overlayroot → Usage.
#!/usr/bin/openrc-run
# Copyright 2022 Nitrux Latinoamericana S.C.
# Distributed under the terms of the 3-Clause BSD License
PIDFILE=/run/mybinary.pid
BIN=/path/to/mybinary
start() {
ebegin "Starting mybinary"
start-stop-daemon --start --exec $BIN --pidfile $PIDFILE
eend $?
}
stop() {
ebegin "Stopping mybinary"
start-stop-daemon --stop --exec $BIN --pidfile $PIDFILE
eend $?
}
The structure is straightforward to understand. First, we need to add the correct shebang: #!/usr/bin/openrc-run; otherwise, the script won’t run. We can optionally add a License header. Then, we set two variables, PIDFILE and BIN.
These specify the path to the pidfile and the binary we want to run as a service.
- 🔰 Information: A pidfile is a file that contains the PID of the executable that generated it. The PID file must be in
/run/and use the same name as the binary. - ⚠️ Important: Service scripts for daemons should not use a pidfile; instead, these service scripts must use
supervise-daemon.
Next, we have two shell functions, start and stop, which we use to start and stop the binary we want to run.
The OpenRC user guide states, “A depend function declares the dependencies of this service script. All scripts must have start/stop/status functions[…].”
#!/usr/bin/openrc-run
# Copyright 2022 Nitrux Latinoamericana S.C.
# Distributed under the terms of the 3-Clause BSD License
PIDFILE=/run/mybinary.pid
BIN=/path/to/mybinary
depend() {
after service1 service2
}
start() {
ebegin "Starting mybinary"
start-stop-daemon --start --exec $BIN --pidfile $PIDFILE
eend $?
}
stop() {
ebegin "Stopping mybinary"
start-stop-daemon --stop --exec $BIN --pidfile $PIDFILE
eend $?
}
- 🔰 Information: For more information about ‘service dependencies,’ check The Depend Function in the OpenRC user guide.
Usage
Users must add the service scripts to a runlevel. As described in the OpenRC user guide, “OpenRC has a concept of runlevels, similar to what sysvinit historically offered. A runlevel is a collection of services that need to be started.”
- 🔰 Information: All runlevels are in
/etc/runlevels/with symlinks to/etc/init.dwith the actual service script files. By default, there are seven runlevels in Nitrux; however, users can create custom runlevels.
❯ ll /etc/runlevels total 0 drwxr-xr-x 2 root root 3 abr 2 2021 boot drwxr-xr-x 2 root root 489 jul 6 17:06 default drwxr-xr-x 2 root root 28 jul 6 17:06 nonetwork drwxr-xr-x 2 root root 102 jul 6 17:06 off drwxr-xr-x 2 root root 62 jul 6 17:06 recovery drwxr-xr-x 2 root root 3 abr 2 2021 shutdown drwxr-xr-x 2 root root 499 jul 6 17:06 sysinit
The command rc-status lists all currently active runlevels and the state of services in them.
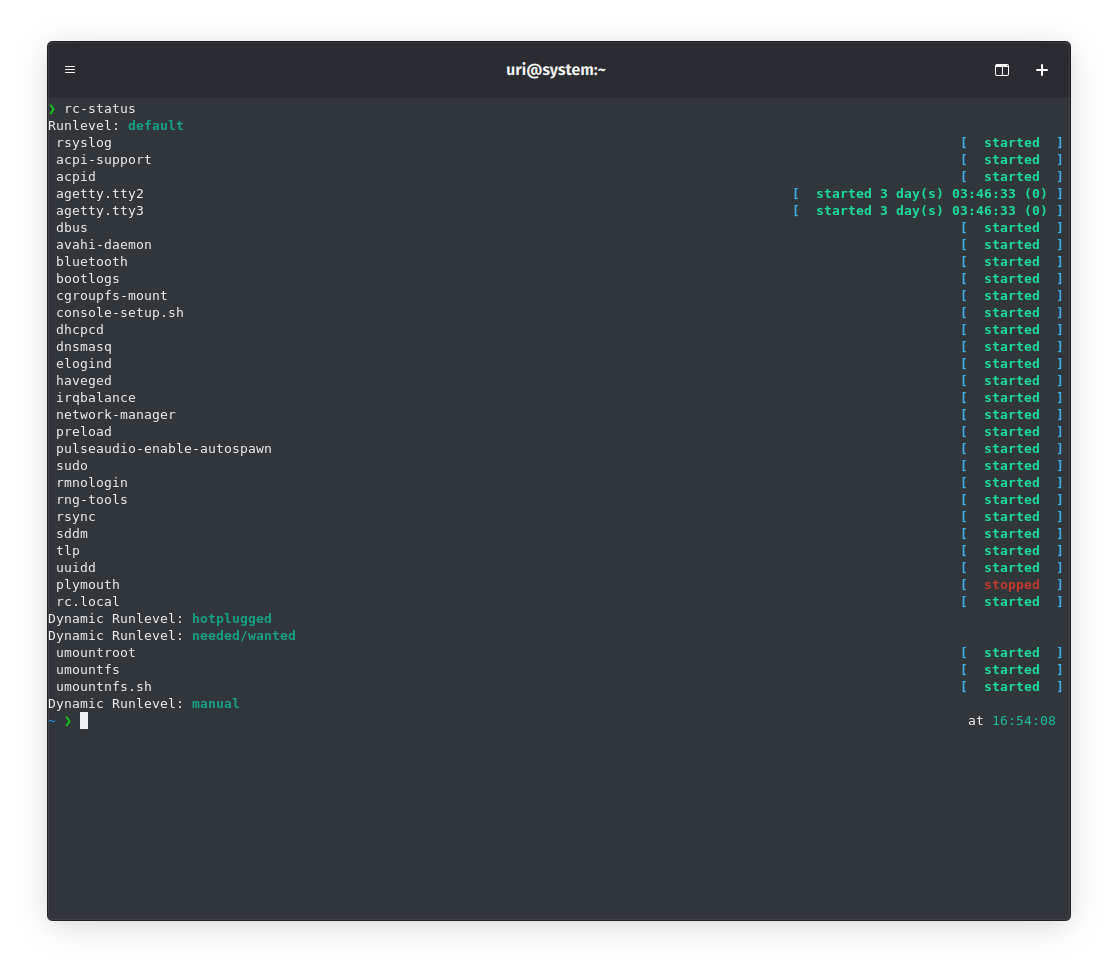
Output of rc-status.
To start or stop services at any time, we use the command rc-service.
sudo rc-service someservice start sudo rc-service someservice stop
To manage services in runlevels, we use the command. rc-update.
- 🔰 Information: The option
addwill add the service to the specified run level, and the optiondelwill remove the service from the specified run level.
sudo rc-update add service default sudo rc-update del service default
Run rc-update to see all runleveles and their services.
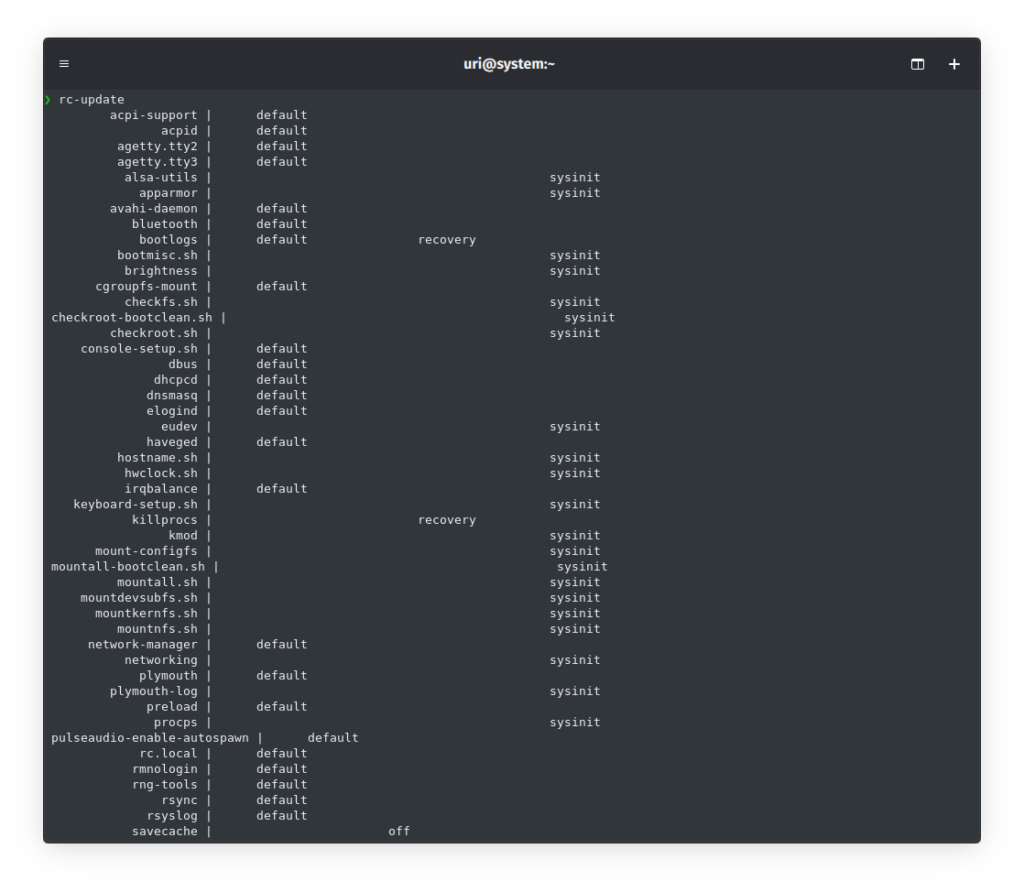
Output of rc-update.
Finally, to update the services list, follow these steps.
sudo rc-update -u
Troubleshooting
If a service we added is not working, we can check the OpenRC log file to find out why. To do so, run the following command.
tail -n +1 /var/log/rc.log
That’s it; this concludes today’s tutorial. Stay put for the second part, where we’ll check the equivalent of “user services.”